Ziel der Validierungsstudie war das System der intraoperative Pedographie mit der herkömmlichen Pedographie zur Validierung zur vergleichen [13].
Methodik
Die Objektivität des Pliance®-Systems wurde analysiert, indem standardisierte Kräfte auf die im KIOP® liegende Matte eingeleitet wurden. Die Kalibrierung erfolgte mit dem Kalibrierungssystem Trublu Calibration Device® (Novel GmbH München) [14].
Die Reliabilität des Pliance-Systems® wurde analysiert in dem zehnmal dieselbe definierte Kraft auf der im KIOP® liegenden Matte eingeleitet wurde. Auch hier wurde, wie beschrieben, das Trublu Calibration® System benutzt. Eine statistische Analyse der wiederholten Messungen zeigte keine signifikanten Abweichungen zwischen den Messungen.
Die Validierung an sich erfolgte in zwei Schritten. Die Anzahl der Probanden für beide Schritte wurde statistisch nach Kontrolle des Studiendesigns festgelegt. Dabei erfolgte eine „Poweranalyse“ die eine „power“ von mindestens 80% voraussetzte.
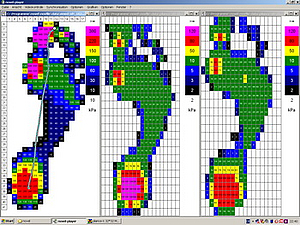
Schritt 1 (Abbildung 6): Vergleich einer standardmäßigen dynamischen Pedographie [1,7], einer statischen Pedographie im Stehen (drei Versuche) und einer Pedographie mit KIOP (drei Versuche, Ziel-Gesamtkraft entsprechend halbes Körpergewicht). Diese Versuche wurden an gesunden wachen Probanden durchgeführt.
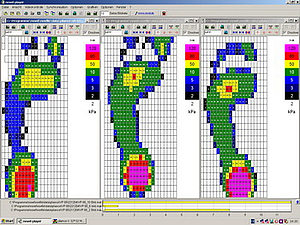
Schritt 2 (Abbildung 7): Vergleich von Pedographie im Stehen, Pedographie mit KIOP am wachen und Pedographie mit KIOP am anästhesierten Patienten (drei Versuche, Ziel-Gesamtkraft entsprechend halbes Körpergewicht).
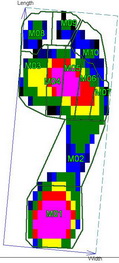
Alle Daten aus den Messungen wurden mit dem Softwarepaket „Medical Professional“ Version 12.3.18 (Novel, München) ausgewertet. Das Programm automask®, aus dem o.g. Softwarepaket teilte den Fuß in zehn Bereiche (Abbildung 8). Diese Aufteilung des Fußes in die zehn Felder erfolgte ohne manuelle Eingriffe. Der Algorithmus der Software basiert auf geometrischen Charakteristika des Abdruckes des Fußes, der den höchsten Druck erzeugte. Für diese Charakteristika wurde eine bestimmte Streuung definiert. Diese Streuung lag für das Emed-AT® System bei 1 N/cm2. Für das Pliance® System lag die Streuung bei 0,2 N/cm2. Die Differenz der Streuungen ist durch die höhere Sensitivität des Pliance® Systems bedingt.
Es wurden ONEWAY-ANOVA-Tests mit Post-Hoc-Scheffé-Test durchgeführt.
Die Nullhypothese, bei einem Signifikanzniveau < 0,05, lautete, dass kein Unterschied der Kraftverteilung des Fußes zwischen den sechs verschiedenen Messungen des ersten und zweiten Schrittes, zwischen den vier Messmethoden mit dem Pliance® System des ersten und zweiten Schrittes, zwischen allen Messmethoden des ersten Schrittes und zwischen allen Messmethoden des zweiten Schrittes besteht.
Die Studie wurde von der Ethikkommision der Medizinischen Hochschule Hannover genehmigt.