Die Navigation bei Korrekturoperationen im Bereich des OSG hat sich wie oben beschrieben bewährt, da dadurch eine sehr exakte Knochen- und Implantatposition erreicht werden kann [21,22]. Gleichzeitig hat sich die Navigation bei der Endoprothetik, vor allem an Hüft- und Kniegelenk, bewährt weil auch hier eine hohe Genauigkeit erzielt wird und insbesondere Ungenauigkeiten vermieden werden [2,3,4,7,8,9,15,16,17,18,19,20,23,24,25,26,27,28,29]. Als logische Konsequenz drängt sich die Navigation der OSG-Prothesenimplantation auf. Bereits 2007 konnten Adams et al in vitro die konstant hohe Genauigkeit der tibialen Osteotomie zeigen [1]. Gleichzeitig wurde bereits vielfach auf die extrem hohe Bedeutung des korrekten Alignements, d.h. der korrekten Prothesenposition insbesondere bei OSG-Endoprothese hingewiesen [5,10,11,13]. Bis zum Erscheinen dieser Auflage ist allerdings leider immer noch kein System zur Implantation einer OSG-Endoprothese verfügbar. Allerdings ist der Autor des Buches seit einiger Zeit mit der Entwicklung eines derartigen Systems beschäftigt. Dieses System funktioniert wird im Gegensatz zur oben beschriebenen Anwendung bei Korrekturarthrodesen (Kapitel 3.2. - Kapitel 3.5.) röntgenunabhängig ("imageless"). Dieses System hat den Vorteil des wesentlich geringeren technischen Aufwands im Vergleich zur 2D- oder gar 3D-Röntgenbildgebung-gestützten Navigationstechnik [4,23,26]. Gleichzeitig wird durch die Abtastung anatomischer Landmarken und Rotation um das Hüftgelenkszentrum mit hoher Genauigkeit die OSG-Gelenkmorphologie und die Beinachse erfasst [4,23,26]. Insbesondere die Erfassung der Beinachse ist mit 2D- oder gar 3D-Röntgenbildgebung-gestützter Navigation nicht sinnvoll möglich. Das Alignement erfolgt dabei nicht wie bisher mit Ausrichtung sowohl der tibialen als auch der talaren Komponente an der Tibiaachse [6,10,12]. Dabei wird bei allen derzeit verfügbaren Systemen sowohl der Schnittblock für die tibiale als auch für die erste talare (kraniale horizontale Resektion am talaren Dom) an der Tibiaachse ausgerichtet. Im Gegensatz dazu erlaubt das System für die navigierte OSG-Prothesenimplantation erstmals die Ausrichtung der tibialen Komponenten nicht nur an der Tibiaachse sondern insbesondere auch an der Achse des gesamten Beins (Beinachse) (Abbildung 1). Damit ist gewährleistet, dass die tibiale Komponente in der Frontalebene exakt senkrecht zur Beinachse positioniert werden kann. Weiterhin wird auch die talare Komponente mit dem System für die navigierte OSG-Prothesenimplantation in der Frontalebene nicht mehr wie bisher an der Tibiaachse ausgerichtet sondern im Verhältnis zum Boden (Abbildung 1). Das bedeutet, dass die talare Komponente so implantiert werden kann, dass sie in der Frontalebene genau parallel zum Boden liegt. Damit sind in der Frontalebene die tibiale Komponente (Senkrecht zur Beinachse ausgerichtet) und die talare Komponente (Parallel zum Boden ausgerichtet) genau parallel zueinander ausgerichtet und dies beim Stand bzw. in der Standphase des Gangs. Durch dieses Prinzip soll das sog. "Edgeloading", d.h. die ungleiche Belastung im Vergleiche des medialen und lateralen Prothesenbereichs vermieden werden. Es ist allgemein bekannt, dass dieses "Edgeloading" zu frühzeitiger Prothesenlockerung und frühzeitigem Prothesenverschleiß führt [6,10,12]. Daraus folgt, dass mit dem vorgestellten Prinzip Prothesenlockerung und -verschleiß minimiert werden könnten. Ein weiterer Aspekt stellt die Optimierung die Weichteilbalancierung durch eine exakte Ausrichtung der tibialen und talaren Komponenten zueinander dar [6,12]. Darüber hinaus erlaubt das System für die navigierte OSG-Prothesenimplantation ähnlich wie die Systeme der navigierten Knieendoprothetik eine exakte Stellungs-und Bewegungsregistrierung und -analyse mit Probeimplantaten und endgültigen Implantaten zur Überprüfung von Bewegungsumfang, Alignement und Weichteilbalancierung. Dabei lassen sich durch Analyse der Positionen von tibialer Komponente und damit der Tibia und der talaren Komponente und damit des Talus zueinander in verschiedenen Bewegungsstellungen des OSG genaue Rückschlüsse auf die Weichteilspannung ziehen. Wird z.B. bei Neutralstellung oder bei Dorsalextensionsstellung oder bei Plantarflektionsstellung ein vermehrter Varus registriert, zeigt dies eine vermehrte Spannung der medialen Bandstrukturen in diesen Stellungen, was dann durch spezifische Weichteilprozeduren adressiert werden kann. Gleichzeitig kann durch eine genaue Analyse des Abstands zwischen tibialer Komponente/Tibia und talarer Komponente/Talus genaue zwischen einer zu hohen oder zu geringen Weichteilspannung differenziert werden. So ist z.B. bei einer Varusstellung in einer bestimmten Gelenkposition durch den Komponenten-/Knochenabstand differenzierbar ob die Weichteilspannung medial zu groß ist oder ob die Weichteilspannung lateral zu gering ist was jeweils unterschiedliche Maßnahmen erfordert.
Navigation
Detaillierte Darstellung navigierte Implantation Endoprothese obere Sprunggelenk
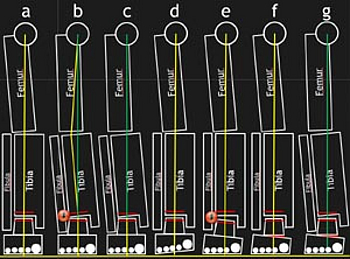
Prinzip der Ausrichtung der tibialen und talaren Komponente bei OSG-Endoprothesenimplantation. Bei dem bisherigen Prinzip erfolgt die Ausrichtung der tibialen und der talaren Komponente gegenüber der Tibiaachse. Dies ist unkritisch, wenn die Tibiaachse genau der Beinachse entspricht und der Rückfuß orthograd ist, d.h. in der Frontalebene verläuft die Oberfläche des talaren Doms parallel zum Boden ausgerichtet (Abbildung 1a). Falls die Tibiaachse nicht der Beinachse entspricht, wie z.B. beim Genu varum, dann führt die Ausrichtung der tibialen Komponente an der Tibiaachse auch zu einer Varusstellung der tibialen Komponente mit daraus folgenden lateralem "Edgeloading" (Abbildung 1b; Tibiaachse gelb, Beinachse grün). In diesen Fällen wünscht der Patient häufig keine Korrekturosteotomie im Kniebereich, so dass bei gering ausgeprägten Deformitäten auch eine Korrektur durch eine tibiale Resektion, die nicht senkrecht zur Tibiaachse sondern senkrecht zu Beinachse ausgerichtet ist (Abbildung 1c). Dadurch wird das "Edgeloading" vermieden. Diese Methode ist allerdings nur bei minimal ausgeprägtem Genu varum oder valgum möglich. Bei gerader Beinachse aber nicht orthograden Fuß, z.B. Rückfußvalgus, führt die Ausrichtung der talaren Resektion an der Tibiaachse dazu, dass nicht parallel zur Fußsohle ausgerichtet ist (Abbildung 1d). Dies ist intraoperativ häufig unkritisch. Wenn allerdings im Rahmen der Mobilisation die Fußsohle unter Belastung auf dem ebenen Boden aufliegt führt dies wiederum zum "Edgeloading", da die talare Komponente nicht parallel zum Boden liegt und damit nicht parallel zur tibialen Komponente, die ja wiederum senkrecht zur Beinachse liegt (Abbildung 1e). Da bei der ersten talaren Resektion, die den kranialen Anteil des talaren Doms entfernt, regelhaft nur minimal Knochen entfernt wird, kann hier nicht wie an der Tibia eine Ausrichtung durch eine vermehrte Resektion medial oder lateral (hier wäre lateral nötig) erfolgen. Es muss beispielsweise eine Korrektur im Bereich des Subtalargelenks erfolgen um zu gewährleisten, dass die talare Komponente parallel zum Boden ausgerichtet ist (Abbildung 1f). Abbildung 1g zeigt eine Kombination aus tibialer Resektion valgisch im Verhältnis zur Tibiaachse und senkrecht zur Beinachse und eine talare Resektion parallel zum Boden durch Korrektur im Bereich des Subtalargelenks. Das Navigationssystem führt dabei natürlich keine Korrektur oder korrekte Ausrichtung aus, zeigt aber die Ausrichtung der Osteotomie bzw. der Komponente im Verhältnis zur Beinachse und dem Boden und das Verhältnis der tibialen und talaren Komponente zueinander (s. Abbildung 11a bis 11b).
Ziel der navigierten OSG-Prothesenimplantation ist die reproduzierbare exakte Knochenresektion an Tibia und Talus mit exakter Ausrichtung im Verhältnis zur gesamten Beinachse und dem Boden möglich. Mit dem System zur navigierten OSG-Prothesenimplantation ist eine exakte Ausrichtung bzw. Zentrierung der tibialen zur talaren Komponenten und andersherum möglich. Mit dem System zur navigierten OSG-Prothesenimplantation ist eine exakte Stellungs-und Bewegungsregistrierung und -analyse mit Probeimplantaten und endgültigen Implantaten zur Überprüfung von Bewegungsumfang, Alignement und Weichteilbalancierung möglich.
- Mit navigierter OSG-Prothesenimplantation ist eine reproduzierbare exakte Knochenresektion an Tibia und Talus möglich. Dabei ist erstmals eine exakte Ausrichtung im Verhältnis zur gesamten Beinachse und dem Boden möglich.
- Mit dem System zur navigierten OSG-Prothesenimplantation ist eine exakte Ausrichtung bzw. Zentrierung der tibialen zur talaren Komponenten und anders herum möglich.
- Mit dem System zur navigierten OSG-Prothesenimplantation ist eine exakte Stellungs-und Bewegungsregistrierung und -analyse mit Probeimplantaten und endgültigen Implantaten zur Überprüfung von Bewegungsumfang, Alignement und Weichteilbalancierung.
- Der Einsatz der Navigation erfordert den Einsatz teurer Navigationsgeräte und zu Beginn des Einsatzes eine verlängerte OP Zeit.
- Der Einsatz der Navigation erfordert das zusätzliche Einbringen von Schanz´schen Schrauben zur Fixation von Markern (Dynamische Referenzbasen [DRB]) in Tibia und Talus. Dafür ist an der proximalen Tibia eine zusätzliche Stichinzisionen nötig.
- Arthrose OSG
- Deformität des OSG
- Lokale floride Infektion
- Schwere periphere arterielle Verschlusskrankheit
- Übliche allgemeine Operationsrisiken
- Übliche Risiken bei Implantation einer OSG-Endoprothese, wie Prothesenlockerung, Prothesenverschleiss, persistierende Schmerzen, Bewegungseinschränkung, Kraftminderung
- Zusätzliche Invasivität durch Montage von 2 dynamischen Referenzbasen (DRB)
- Sorgfältige anamnestische und klinische Evaluation von Beschwerden und Fehlstellung
- Überprüfung der Hautverhältnisse, Durchblutung und neurologischem Status
- Genaue Analyse der Achsenverhältnisse anhand folgender Röntgenaufnahmen: Beinachsenaufnahme, OSG beidseits in 2 Ebenen mit Belastung, Saltzman-view beidseits, Füße beidseits in 2 Ebenen mit Belastung. Bei den Belastungsaufnehmen des OSG in 2 Ebenen sollte jeweils eine Größenreferenz mit abgebildet werden um die exakte Planung der Prothesengröße zu ermöglichen. Dabei hat sich eine Metallkugel, z.B. mit einem Durchmesser von 30 mm bewährt (s. Abbildung 2a und Abbildung 2b). Diese muss jedoch auf Höhe des Gelenks fixiert sein und darf nicht näher an der Kassette oder weiter davon weg sein, weil sonst durch das Prinzip des Strahlensatz bei punktueller Strahlenemmission die Größenreferenz nicht exakt ist.
- ggf. Computertomographie
- Bei nicht eindeutig tastbaren Fußpulsen Dopplersonographie und ggf. Angiographie (digitale Subtraktionsangiografie)
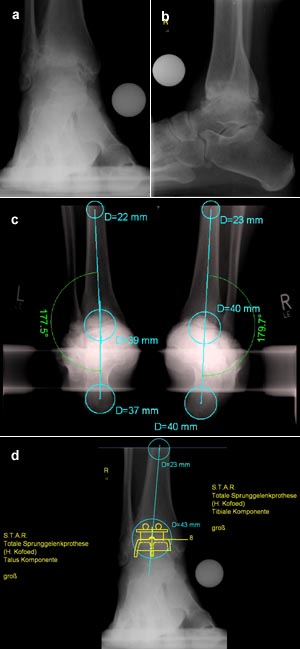
Analyse und Planung einer navigierten Implantation einer OSG Endoprothese (Modell STAR, SBI, Morrisville, USA) bei einem Fall ohne Achsenabweichung oder Deformität, d.h. gerade Bein- und Rückfußachse (Abbildung 2a: Belastungsaufnahme OSG ap; Abbildung 2b: Belastungsaufnahme OSG seitlich; Abbildung 2c: Saltzman-view; Beinachsenaufnahme nicht gezeigt). Abbildung 2d zeigt die abgeschlossene Planung ap und Abbildung 2e seitlich. In diesem Fall wurde die Planungssoftware Medicad2 (Hectec, Landshut).
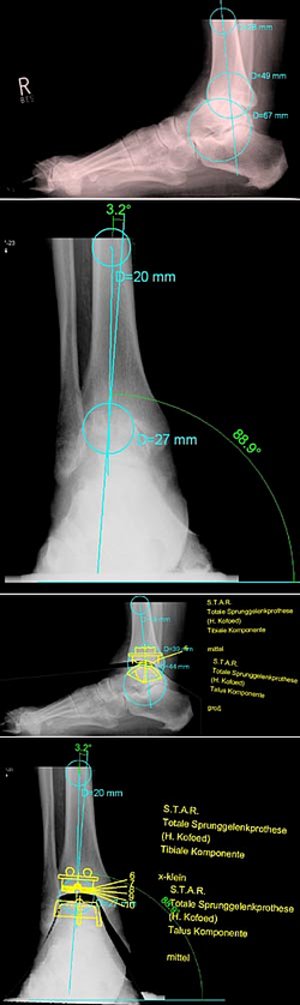
Analyse und Planung einer navigierten Implantation einer OSG Endoprothese (Modell STAR, SBI, Morrisville, USA) bei einem Fall mit Genu varum von 3,6° und einer ventralen Verschiebung im OSG. Abbildung 3a zeigt die Belastungsaufnahme des OSG seitlich mit ausgemessener ventraler Verschiebung des Talus und gesamten Fußes zeigt. Abbildung 3b zeigt eine Belastungsaufnahme des OSG ap bei der bereits die aus der Ganzbeinachsenaufnahme (nicht gezeigt) bekannte Genu varum Deformität von 3,6° der Gestalt berücksichtigt ist, dass die Beinachse eingezeichnet ist. Abbildung 3c zeigt die abgeschlossene Planung seitlich mit korrigierter Stellung im OSG, d.h. dorsale Verschiebung im Vergleich zum Status vor der Planung. Abbildung 3d zeigt die abgeschlossene Planung ap Einsatz der tibialen Komponente senkrecht zur Beinachse. In diesem Fall wurde die Planungssoftware Medicad3 (Hectec, Landshut).
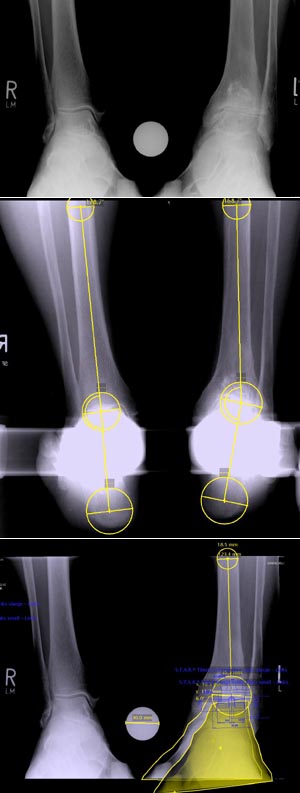
Analyse und Planung einer navigierten Implantation einer OSG Endoprothese (Modell STAR, SBI, Morrisville, USA) bei einem Fall mit einem Rückfußvarus von 11.3°. Abbildung 4a zeigt die Belastungsaufnahme des OSG ap mit bereits deutlich sichtbarer Varusstellung der Rückfußes an der betroffenen linken Seite. Abbildung 4b zeigt die genaue Analyse des Rückfußvarus im Saltzman-view. Abbildung 3c zeigt die abgeschlossene Planung ap mit korrigierter Stellung im OSG, d.h. Valgisierung des gesamten (Rück-)fußes. In diesem Fall wurde die Planungssoftware Orthoplanner (Localite, St. Augustin).
- Knochensieb nach Standard
- Sieb mit OSG-Endoprothesen-Instrumenten
- Navigationssystem (hier Prototyp Ankle Navigator, Localite, St. Augustin)(Abbildung 5)
- Sieb mit Navigationsinstrumenten die teilweise mit den standardmäßigen OSG-Endoprothesen-Instrumenten konnektiert werden

Navigationssystem (Prototyp Ankle Navigator, Localite, St. Augustin). Dieses System hat den Vorteil des wesentlich geringeren technischen Aufwands im Vergleich zur 2D- oder gar 3D-Röntgenbildgebung-gestützten Navigationstechnik [4,23,26]. Gleichzeitig wird durch die Abtastung anatomischer Landmarken und Rotation um das Hüftgelenkszentrum mit hoher Genauigkeit die OSG-Gelenkmorphologie und die Beinachse erfasst [4,23,26]. Insbesondere die Erfassung der Beinachse ist mit 2D- oder gar 3D-Röntgenbildgebung-gestützter Navigation nicht sinnvoll möglich. Beim endgültigen System ist die wesentliche Verkleinerung des gesamten Systems geplant so dass dies in einem Aktenkoffer transportiert werden kann. Mit diesem System wird auch die Analyse und Planung einer navigierten Implantation einer OSG Endoprothese möglich sein und die Planungsdaten sind dann intraoperativ zur Navigation verfügbar (s. Abbildung 2 bis Abbildung 4). Weiterhin soll optional ein an den Schnittblöcken angebrachtes Display verfügbar sein [24].
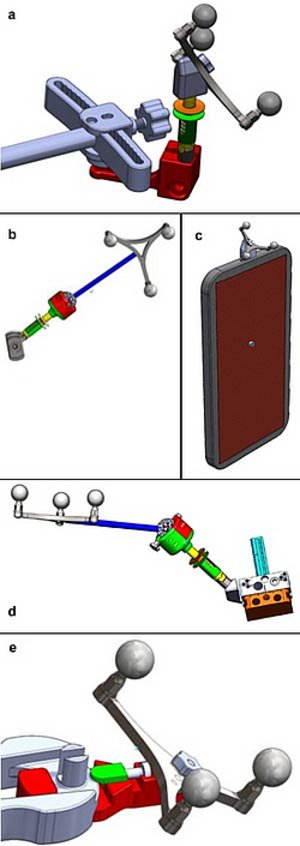
Navigationsinstrumente, die teilweise mit den standardmäßigen OSG-Endoprothesen-Instrumenten konnektiert werden (hier für Modell STAR, SBI, Morrisville, USA).
Abbildung 6a: Marker für proximale Tibia mit Adapter. Der Adapter (rot) wird an der standardmäßig eingesetzten Schanz´schen Schraube, die zur Befestigung der tibialen Achsausrichtung dient, befestigt (s. Abbildung 8). Zur Sicherung der Rotationsstabilität wird eine zweite Schanz´sche Schraube (Durchmesser 3 mm) durch den Adapter in die Tibia eingebracht. Der Marker (grau) wird and den Adapter angebracht.
Abbildung 6b: Marker für Talus. Dieser wird an zwei 3mm Schanz´schen Schrauben, die durch den Standardzugang von dorsomedial in den Talushals eingebracht werden, befestigt. Der Marker ist 360° rotierbar und 120° schwenkbar.
Abbildung 6c: Bodenplatte mit Marker. Die Fußplatte ist optional mit einem Kraftmesssensor ausgestattet. Damit kann intraoperativ überprüft werden ob die Kraftverteilung unter der Fußsohle der Kraftverteilung im Stand (präoperativ registriert) entspricht (s. Abbildung 10). Damit wird sichergestellt, dass der Fuß plantigrad aufliegt und der mit der Fußplatte simulierte Boden funktionell dem tatsächlichen Boden entspricht (Details s. Kapitel 4). Regelhaft ist aber die Verwendung der Kraftmessplatte in der Bodenplatte nicht nötig, da die Simulation des Bodens auch ohne die Kraftverteilungsmessung ausreichend genau ist.
Abbildung 6d: Marker für die Schnittleere der tibialen und ersten (kranialen) talaren Osteotomie. Dieser Marker wird direkt am Instrumentarium der Prothese befestigt und dient der Navigation der tibialen (s. Abbildung 11b) und ersten talaren (s. Abbildung 11c) Osteotomie. Auch dieser Marker ist 360° rotierbar und 120° schwenkbar.
Abbildung 6e: Marker für das Instrument zur Platzierung des Talusreferenzblocks (s. Abbildung 12). Mit diesem Instrument wird nach der ersten talaren Resektion der Talusreferenzblock gesetzt. An diesem werden später die Schnittleere für die anteriore und posteriore talare Osteotomie und die Schnittleere für die medialen und laterale talare Osteotomie fixiert. Das bedeutet, dass durch die exakte Platzierung des Talusreferenzblocks die exakten Osteotomien am Talus anterior, posterior, medial und lateral ermöglicht werden.
- Allgemeinanästhesie oder Spinal-/Periduralanästhesie
- Rückenlagerung mit an der Tischkante überstehender Ferse
- Oberschenkelblutleere
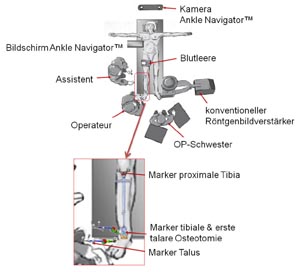
Lagerung des Patienten und Positionierung von Navigationssystem (Ankle Navigator) und Personal. Der Navigationsmonitor wird im Idealfall direkt am OP-Tisch befestigt und steril bezogen. Die Positionierung aller Geräte und des kompletten Personals muss so erfolgen, dass von der Kamera des Navigationssystems „freie Sicht“ auf die Marker besteht. Der konventionelle Röntgenbildverstärker dient zur zusätzlichen Überprüfung zu Beginn der Navigation.
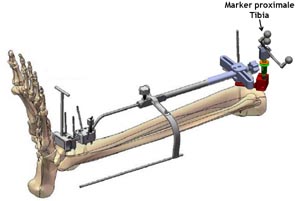
Auswickeln mit Esmarch Binde und Insufflation der Blutleere mit 350mm HG. Optional ist auch die Verwendung einer Blutsperre oder die Operation ohne Blutleere/-sperre. Ventraler Zugang zum oberen Sprunggelenk Hierbei Z-förmiges Einschneiden des Retinaculum extensorum zum leichteren späteren Verschluss. Der Zugang liegt in der Tiefe je nach Sehnenverlauf zwischen den Sehnen des M. tibialis anterior und M. extensor hallucis longus oder zwischen den Sehnen des M. extensor hallucis longus und M. extensor digitorum longus. Die A. dorsalis pedis sollte in jedem Fall nach lateral gehalten werden, da sie vor allem die lateralen Strukturen versorgt während die medialen Strukturen auch mit aus Ästen der A. tibialis posterior versorgt werden. Darstellung des OSG mit Entfernung von Osteophyten. Dann Platzierung des Markers an der der proximalen Tibia (s. Abbildung 6a). Der Adapter (rot) wird an der standardmäßig eingesetzten Schanz´schen Schraube, die zur Befestigung der tibialen Achsausrichtung dient, befestigt. Zur Sicherung der Rotationsstabilität wird eine zweite Schanz´sche Schraube (Durchmesser 3 mm) durch den Adapter in die Tibia eingebracht. Der Marker (grau) wird and den Adapter angebracht.
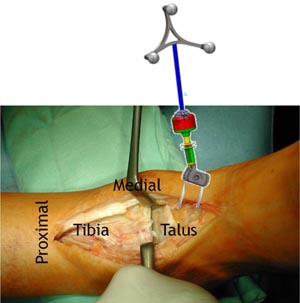
Platzierung des Markers am Talus (s. Abbildung 6b). Dieser wird an zwei 3mm Schanz´schen Schrauben, die durch den Standardzugang von dorsomedial in den Talushals eingebracht werden, befestigt. Der Marker ist 360° rotierbar und 120° schwenkbar.
Nun Akquisition OSG-Gelenkmorphologie durch Abtasten folgender Punkte mit dem Standard-Naviationspointer (nicht abgebildet). Dabei werden folgende Landmarken abgetastet und in das Navigationssystem eingelesen: Innenknöchelspitze, Außenknöchelspitze, Oberfläche des Tibiaplafonds, Gelenkfläche des Innenknöchels und Außenknöchels, Oberfläche des talaren Doms mit medialer und lateraler Talusschulter und medialer und lateraler Taluswand. Dann Akquisition der Beinachse durch Bewegen des im Knie gestreckten Beins um das Rotationszentrum des Hüftgelenks. Die Referenzpunkte für die Beinachse sind das Rotationszentrum des Hüftgelenks und das Zentrum des Tibiaplafonds. Nun Festlegung des sog. "Korrekturwinkels" bei Abweichung der Beinachse in Varus oder Valgus. Dabei Abtasten folgender Landmarken am Knie: Epicondylus medialis und laterales, medialer und lateraler Tibiakopf und Tuberositas Tibiae. Durch diese Landmarken wird das Kniegelenkszentrum definiert und die Mechanische Achsdeviation (MAD) berechnet. Dadurch kann die Winkelabweichung zwischen Tibiaachse und Beinachse berechnet werden und später bei der Ausrichtung der Osteotomien berücksichtigt werden (s. Abbildung 3a bis Abbildung 3d).

Anlegen der Bodenplatte mit Marker (s. Abbildung 6c). Dadurch wird der Boden simuliert und als spätere Referenz registriert. Die Fußplatte ist optional mit einem Kraftmesssensor ausgestattet. Damit kann intraoperativ überprüft werden ob die Kraftverteilung unter der Fußsohle der Kraftverteilung im Stand (präoperativ registriert) entspricht. Damit wird sichergestellt, dass der Fuß plantigrad aufliegt und der mit der Fußplatte simulierte Boden funktionell dem tatsächlichen Boden entspricht (Details s. Kapitel 4). Regelhaft ist aber die Verwendung der Kraftmessplatte in der Bodenplatte nicht nötig, da die Simulation des Bodens auch ohne die Kraftverteilungsmessung ausreichend genau ist.
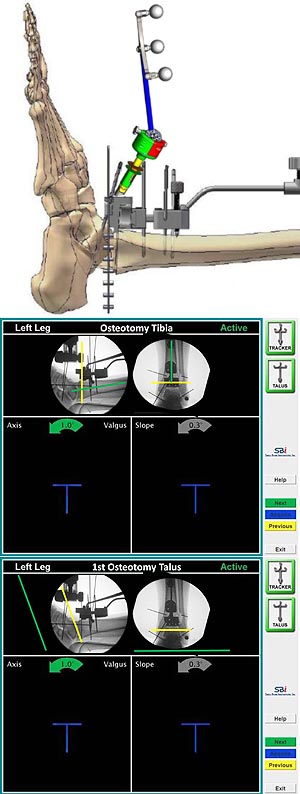
Entknorpelung des OSG. Justierung und Fixation der tibialen Schnittleere nach Standard des Prothesensystems. An diese tibiale Schnittleere wird später Schnittleere für die erste talare Resektion angebracht. Anbringen des Markers an die Schnittleere der tibialen und ersten (kranialen) talaren Osteotomie (s. Abbildung 6d). Dieser Marker wird direkt am Instrumentarium der Prothese befestigt und dient der Navigation der tibialen und ersten talaren Osteotomie. Auch dieser Marker ist 360° rotierbar und 120° schwenkbar. Abbildung 11b zeigt den Bildschirm des Navigationssystems während der navigierten tibialen Osteotomie mit Darstellung der Winkelabweichung der Osteotomie von der Beinachse bzgl. Varus/Valgus und Slope. Die Winkel für Varus/Valgus sind quantitativ und auch qualitativ analog zu einer Ampel mit grün für genau, gelb für kritisch und rot für zu ungenau dargestellt. Eine Varus- oder Valgusrichtung der Osteotomie in und damit der tibialen Prothesenkomponente Relation zur Beinachse sollte generell vermieden werden. Der Slope wird nur quantitativ dargestellt, da er vom Prothesensystem und den anatomischen Gegebenheiten abhängt. Die Darstellung zeigt zusätzlich zur besseren Veranschaulichung virtuell und in Echtzeit Röntgenbildverstärkerbilder ap und seitlich, die Beinachse in grün und die Resektionsrichtung in gelb.
Abbildung 11c zeigt den Bildschirm des Navigationssystems während der navigierten ersten talaren Osteotomie mit Darstellung der Winkelabweichung der Osteotomie in Relation zum Boden bzgl. Varus/Valgus und Slope. Die Winkel für Varus/Valgus sind quantitativ und auch qualitativ analog zu einer Ampel mit grün für genau, gelb für kritisch und rot für zu ungenau dargestellt. Eine Varus- oder Valgusrichtung der Osteotomie in und damit der tibialen Prothesenkomponente Relation zum Boden sollte generell vermieden werden. Der Slope wird nur quantitativ dargestellt, da er vom Prothesensystem und den anatomischen Gegebenheiten abhängt. Die Darstellung zeigt zusätzlich zur besseren Veranschaulichung virtuell und in Echtzeit Röntgenbildverstärkerbilder ap und seitlich, den Boden in grün und die Resektionsrichtung in gelb.
Nach tibialer und erster talarer Resektion. Erfolgt die Überprüfung der geplanten Komponentengröße. Dann navigiertes Einsetzen des Talusreferenzblocks mit dem Setzinstrument mit Marker (s. Abbildung 6e). Die exakte Platzierung des Talusreferenzblocks gewährleistet später exakte Osteotomien am Talus anterior, posterior, medial und lateral.
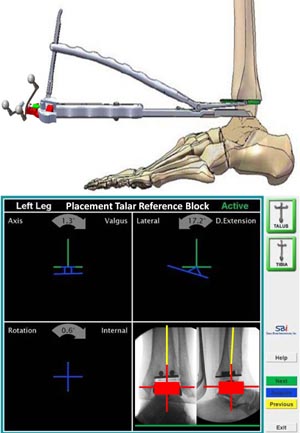
Abbildung 12b zeigt den Bildschirm des Navigationssystems während der navigierten Platzierung des Talusreferenzblocks mit Darstellung der Winkelabweichung des Talusreferenzblocks in Relation zum Boden bzgl. Varus/Valgus und Slope, und Darstellung der Winkelabweichung des Talusreferenzblocks in Relation zum 2. Strahl bzgl. Rotation. Die Winkel für Varus/Valgus und Rotation sind quantitativ und auch qualitativ analog zu einer Ampel mit grün für genau, gelb für kritisch und rot für zu ungenau dargestellt. Eine Varus- oder Valgusrichtung der Osteotomie in und damit der talaren Prothesenkomponente Relation zum Boden oder eine Innen- oder Außenrotation in Relation zum 2. Strahl sollte generell vermieden werden. Der Slope wird nur quantitativ dargestellt, da er vom Prothesensystem und den anatomischen Gegebenheiten abhängt. Die Darstellung zeigt zusätzlich zur besseren Veranschaulichung virtuell und in Echtzeit Röntgenbildverstärkerbilder ap und seitlich, den Boden in grün, die Beinachse bzw. das Zentrum des Tibiaplafonds in gelb und das Resultat der Talusreferenzblockplatzierung als virtuelle talare Komponente mit Achsen in Rot. Dadurch werden sowohl die Ausrichtung in der Frontalebene (Varus/Valgus), in der sagittaler Ebene (Slope), in der axialen Ebene (Rotation) und die Ausrichtung der talaren Komponente zur tibialen Komponente und anders herum dargestellt.
Nach der navigierten Platzierung des Talusreferenzblocks werden daran die Schnittleere für die anteriore und posteriore talare Osteotomie und die Schnittleere für die medialen und laterale talare Osteotomie fixiert und diese Osteotomien durchgeführt. Diese Osteotomien werden nicht zusätzlich navigiert. Der tibiale und talare Marker werden jedoch in situ belassen. Danach erfolgt je nach Prothesensystem die weitere nicht navigierte Knochenresektion, z.B. für Finnen oder Zapfen an Tibia und Talus. Danach Einsetzen der Probeprothese und Überprüfung der Position mit dem Navigationssystem. Dabei kann das Alignement in frontaler und sagittaler Ebene und bzgl. Rotation registriert und dokumentiert werden. Darüber hinaus kann der Bewegungsumfang und das Alignement (s.o.) in verschiedenen Gelenkpositionen geprüft werden. Damit ist auch eine Überprüfung der der Weichteilbalancierung möglich (s.o.). Bei optimaler Probeprothesenlage einsetzen der endgültigen Prothesenkomponenten nach Standard des Prothesensystems. Danach erneute Überprüfung und Dokumentation von Alignement, Bewegungsumfang und Weichteilbalancierung.
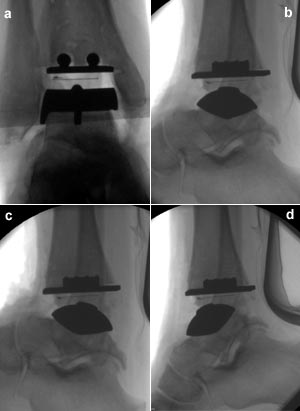
Abschließende Röntgenbildverstärkerkontrolle und -dokumentation (Abbildung 13a: ap; Abbildung 13b: seitlich in Neutralstellung; Abbildung 13c: seitlich in Dorsalextensionsstellung; Abbildung 13d: seitlich in Plantarflektionsstellung). Blutstillung, Redoneinlage und vierschichtiger Wundverschluss (Gelenkkapsel, Retinaculum, Subkutan, Haut). Steriler Verband.
- Postoperativ Anlage einer Orthese (z.B. Vacuped, Oped, Valley)
- Hochlagerung des Beins
- Ab dem ersten postoperativen Tag Mobilisation mit Orthese mit 15 kg Teilbelastung möglich
- Bei guter Knochenqualität sofortige Vollbelastung
- Postoperative Röntgenkontrolle am 1. oder 2. Tag
- Entfernung der Drainage am 2. postoperativen Tag
- Entfernung des Hautnahtmaterials am 12. postoperativen Tag
- Nach 6 Wochen in Abhängigkeit des radiologischen Verlaufs Weglassen der Orthese und Übergang zur Vollbelastung im festen Konfektionsschuh.
- Forcierte Übungsbehandlung nach 6 Wochen
- Fehlfunktion des Navigationssystems
- Infektion
- Pseudarthrose
- CRPS
- Wundheilungsstörung
Die vorgestellte Methode zur navigierten Implantation einer OSG-Endoprothese wurde bisher klinisch noch nicht angewendet. Adams et al zeigten in vitro eine konstant hohe Genauigkeit der tibialen Osteotomie [1]. Dabei verwendeten sie jedoch eine röntgenbildgestütztes System und konnten nur die Tibiaachse berücksichtigen. Auch dies war nur eingeschränkt möglich da die Detektorgröße des Röntgenbildverstärkers begrenzt war. Sie verfolgten diese Prinzip nicht weiter, da es ihnen nicht gelungen war die Beinachse mit einzubeziehen und auch keinerlei Konzept für die Navigation für die talare Komponente vorlag (persönliche Kommunikation Mark Easley). Aufgrund der fehlenden Ergebnisse am OSG sind nur eingeschränkte Rückschlüsse von anderen Gelenken möglich.
Dabei sind vor allem bzgl. der Knieendoprothetik sehr überzeugende Studienergebnisse verfügbar [3,4,14,16,18,25,28]. Insbesondere auch in Deutschland konnte gezeigt werden, dass Ungenauigkeiten (Ausreißer/Outliers) mit Navigation in einem wesentlich höheren Prozentsatz vermieden werden konnten als ohne Navigation [14,18]. Schnurr et al konnten sogar zeigen, dass unerfahrene Operateure mit Navigation eine vergleichbare Genauigkeit erreichten wie erfahrene Operateure ohne Navigation [25]. Nowarkowski et al konnten zeigen, dass Navigationssysteme eine wesentliche Hilfe bei der Weichteilbalancierung bieten [16].
Zusammenfassend lassen sich nach Ansicht des Autors die Ergebnisse insbesondere der navigierten Knieendoprothetik auf die navigierte OSG-Endoprothetik übertragen und lassen eine hohe Genauigkeit mit Vermeidung von Ausreißern und eine optimierte Weichteilbalancierung erwarten. Da das Alignement bei der OSG-Endoprothetik noch wichtiger zu sein scheint als bei anderen Prothesen wird hier der Nutzen der Navigation noch höher sein. Es ist sogar zu erwarten, dass erst die Möglichkeit der Navigation der OSG-Endoprothese zum endgültigen Durchbruch verhelfen wird.
- Adams SB, Jr., Spritzer CE, Hofstaetter SG, Jakoi AM, Pietrobon R, Nunley JA, Easley ME (2007) Computer-assisted tibia preparation for total ankle arthroplasty: a cadaveric study. Int J Med Robot 3(4): 336-340
- DiGioia AM, Jaramaz B, Blackwell M, Simon DA, Morgan F, Moody JE, Nikou C, Colgan BD, Aston CA, Labarca RS, Kischell E, Kanade T (1998) The Otto Aufranc Award. Image guided navigation system to measure intraoperatively acetabular implant alignment. Clin Orthop Relat Res (355): 8-22
- Gothesen O, Espehaug B, Havelin L, Petursson G, Furnes O (2011) Short-term outcome of 1,465 computer-navigated primary total knee replacements 2005-2008. Acta Orthop 82(3): 293-300
- Harvie P, Sloan K, Beaver RJ (2011) Computer navigated total knee arthroplasty: aspects of a single unit's experience of 777 cases. Comput Aided Surg 16(4): 188-195
- Hintermann B, Nigg BM (1995) In vitro kinematics of the axially loaded ankle complex in response to dorsiflexion and plantarflexion. Foot Ankle Int 16(8): 514-518
- Hintermann B, Valderrabano V (2003) Total ankle replacement. Foot Ankle Clin 8(2): 375-405
- Hohmann E, Bryant A, Tetsworth K (2011) A Comparison Between Imageless Navigated and Manual Freehand Technique Acetabular Cup Placement in Total Hip Arthroplasty. J Arthroplasty %20.
- Hohmann E, Bryant A, Tetsworth K (2011) Accuracy of acetabular cup positioning using imageless navigation. J Orthop Surg Res 6(1): 40-
- Huang TW, Hsu WH, Peng KT, Wen-Wei HR, Weng YJ, Shen WJ (2011) Total knee arthroplasty with use of computer-assisted navigation compared with conventional guiding systems in the same patient: radiographic results in asian patients. J Bone Joint Surg Am 93(13): 1197-1202
- Kofoed H (2004) Scandinavian Total Ankle Replacement (STAR). Clin Orthop (424): 73-79
- Leardini A, Catani F, Giannini S, O'Connor JJ (2001) Computer-assisted design of the sagittal shapes of a ligament-compatible total ankle replacement. Med Biol Eng Comput 39(2): 168-175
- Leardini A, O'Connor JJ, Catani F, Giannini S (2004) Mobility of the human ankle and the design of total ankle replacement. Clin Orthop (424): 39-46
- Lewis G (2004) Biomechanics of and research challenges in uncemented total ankle replacement. Clin Orthop (424): 89-97
- Luring C, Kauper M, Bathis H, Perlick L, Beckmann J, Grifka J, Tingart M, Rath B (2011) A five to seven year follow-up comparing computer-assisted vs freehand TKR with regard to clinical parameters. Int Orthop
- Moskal JT, Capps SG (2011) Acetabular Component Positioning in Total Hip Arthroplasty: An Evidence-Based Analysis. J Arthroplasty
- Nowakowski AM, Majewski M, Muller-Gerbl M, Valderrabano V (2011) Development of a force-determining tensor to measure "physiologic knee ligament gaps" without bone resection using a total knee arthroplasty approach. J Orthop Sci 16(1): 56-63
- Parratte S, Pagnano MW, Coleman-Wood K, Kaufman KR, Berry DJ (2009) The 2008 Frank Stinchfield award: variation in postoperative pelvic tilt may confound the accuracy of hip navigation systems. Clin Orthop Relat Res 467(1): 43-49
- Rath B, Springorum HR, Beckmann J, Schaumburger J, Tingart M, Grifka J, Luring C (2011) Aktueller Stellenwert der Navigation in der Knieendoprothetik in orthopadischen und unfallchirurgischen Kliniken in Deutschland. Z Orthop Unfall 149(2): 173-177
- Renkawitz T, Schuster T, Herold T, Goessmann H, Sendtner E, Grifka J, Kalteis T (2009) Measuring leg length and offset with an imageless navigation system during total hip arthroplasty: is it really accurate? Int J Med Robot 5(2): 192-197
- Renkawitz T, Tingart M, Grifka J, Sendtner E, Kalteis T (2009) Computer-assisted total hip arthroplasty: coding the next generation of navigation systems for orthopedic surgery. Expert Rev Med Devices 6(5): 507-514
- Richter M (2009) Navigierte Korrekturarthrodese des oberen Sprunggelenks. Oper Orthop Traumatol 21(3): 313-322
- Richter M (2010) Navigierte Korrekturarthrodese des oberen und unteren Sprunggelenks mit retrograder Marknagelfixierung. Oper Orthop Traumatol 23(2): 141-150
- Rubash HE, Pagnano MW (2009) Navigation in total hip arthroplasty. J Bone Joint Surg Am 91 Suppl 5:17.17-
- Schnurr C, Eysel P, Konig DP (2011) Displays mounted on cutting blocks reduce the learning curve in navigated total knee arthroplasty. Comput Aided Surg
- Schnurr C, Eysel P, Konig DP (2011) Do residents perform TKAs using computer navigation as accurately as consultants? Orthopedics 34(3): 174-05
- Schnurr C, Nessler J, Meyer C, Schild HH, Koebke J, Konig DP (2009) How accurate is image-free computer navigation for hip resurfacing arthroplasty? An anatomical investigation. J Orthop Sci 14(5): 497-504
- Wentzensen A, Zheng G, Vock B, Langlotz U, Korber J, Nolte LP, Grutzner PA (2003) Image-based hip navigation. Int Orthop 27 Suppl 1:S43-6.S43-S46
- Zhang GQ, Chen JY, Chai W, Liu M, Wang Y (2011) Comparison between computer-assisted-navigation and conventional total knee arthroplasties in patients undergoing simultaneous bilateral procedures: a randomized clinical trial. J Bone Joint Surg Am 93(13): 1190-1196
- Zheng G, Marx A, Langlotz U, Widmer KH, Buttaro M, Nolte LP (2002) A hybrid CT-free navigation system for total hip arthroplasty. Comput Aided Surg 7(3): 129-145